

Je prévois de démarrer l'adaptation d'un (ou plusieurs) manches vers une base Thrustmaster, ayant pu trouver un base AVA pour vraiment pas cher.
Le but est de réaliser l'adaptation moi-même et avec des moyens "low tech" accessibles à tout bricoleur.
Donc sans acheter des cartes déjà prêtes (comme celles de rel4y ou debolestis), sans prendre des adaptateurs physiques vendus par des tiers (debolestis). Et sans, non plus, faire appel à de l'impression 3D ou à réaliser mes propres PCB (ça ne serait plus low-tech) - j'utiliserai du PCB générique d'Aliexpress.
Ma première interrogation est sur les schémas de câblage des grips.
Poir le grip F16/A10, je trouve les références suivantes:
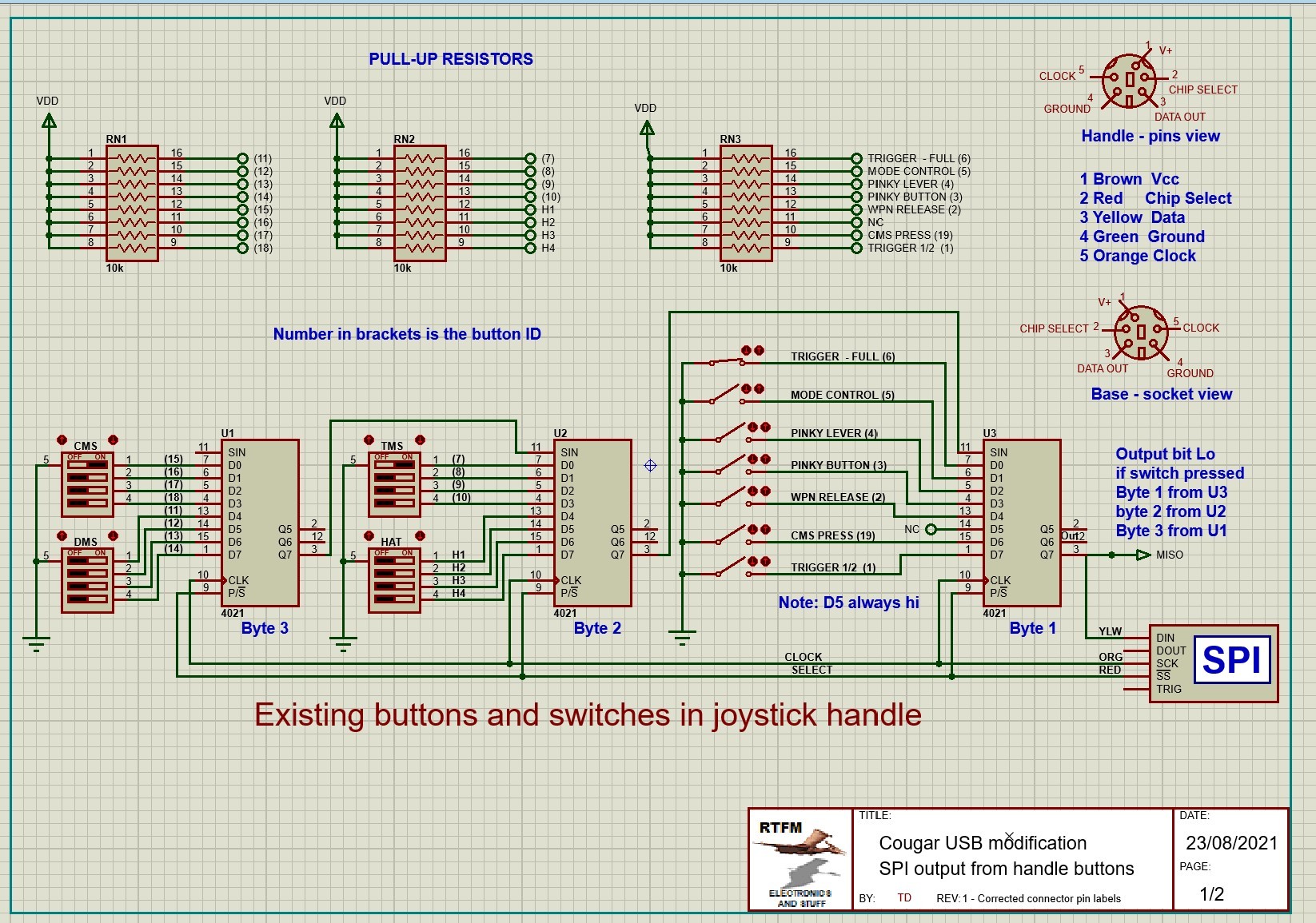
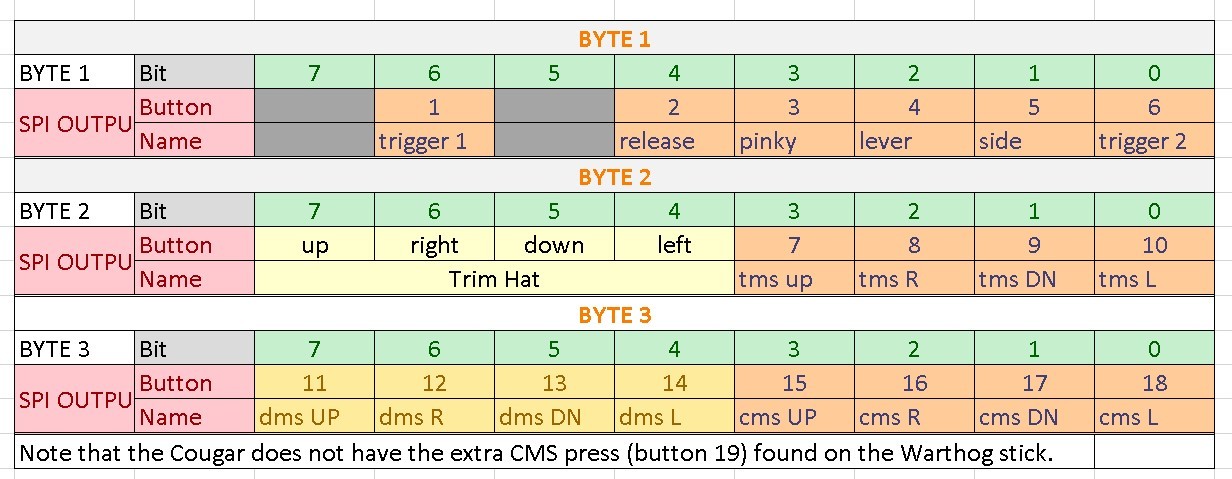
Le schéma montre des entrées inversées (interrupteur fermé) sur le bit 0 / pin 7... c'est juste une liberté "artistique" de cet auteur, ou il faut vraiment inverser (et avoir un comportement appui = circuit ouvert, pas d'appui = fermé)?
Pour le grip de type F18, je n'ai trouvé aucun schéma de câblage... si quelqu'un a une source, ça m'intéresserait.
Pas trouvé d'infos non plus sur le grip du Sol-R, qui apparemment est détachable et peut se mettre sur une base TM AVA... et a un axe de twist.
Merci beaucoup d'avance!


